
Projects
My Projects
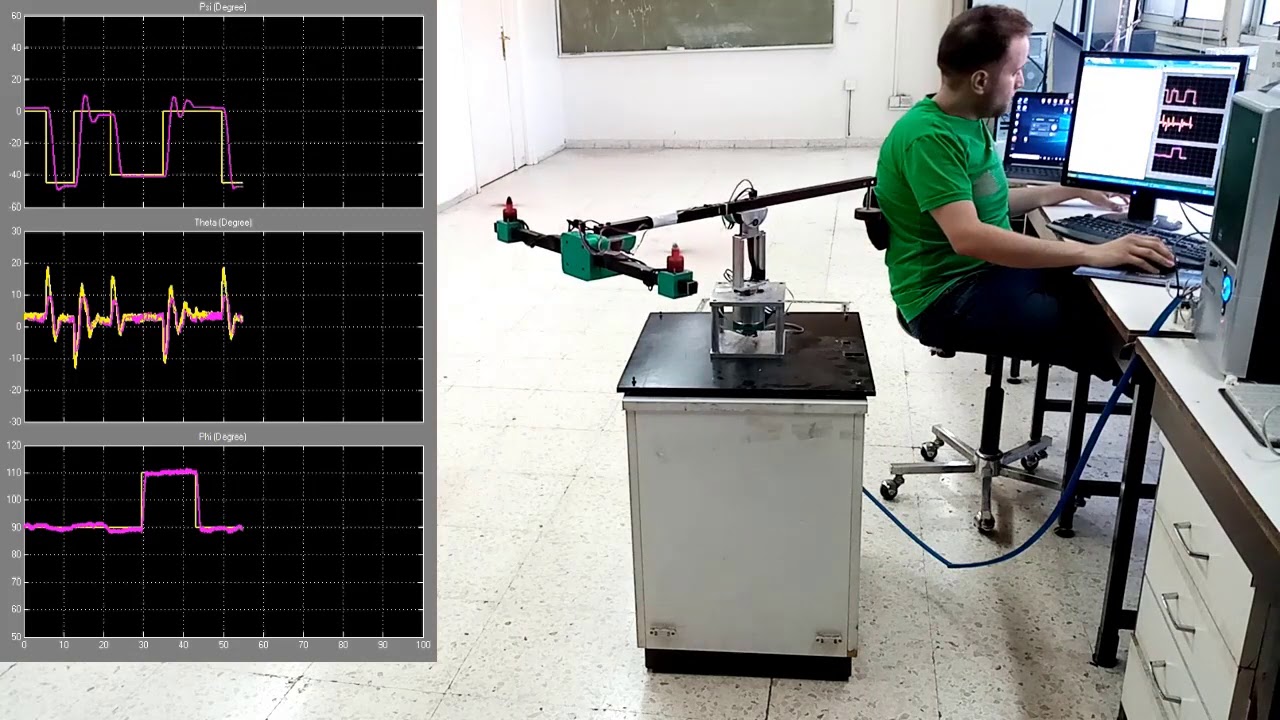
Design, Execute and control of 3 DOF Helicopter.
Date: July 2020.
Institution: Higher Institute for Applied Sciences and Technology.
Address: Damascus, Syria.
This project aims to design and execute 3 DOF Helicopter, as it also aims to control the stability of the system. At first, we designed the mechanism of the platform and selected its components: motors, driving circuits and propellers. Also, we studied the dynamism of the platform and we found the mathematical and dynamic model which the platform follows. Control law is conducted on MATLAB Simulink which work real time with the platform.
Project supervisor: Dr. Chadi Albitar.
Mechanical design: Eng. Nizar Falion.
Electronic, Control and Integration with Matlab: Eng. Ghadeer Shaaban (me 😊).
 Watch Video
Watch VideoReconfigurable Omni-Directional Exploring Robot.
Date: Sept 2020
Institution: Higher Institute for Applied Sciences and Technology
Address: Damascus, Syria
This project aims to design and execute a reconfigurable robot that can move in multi-directions by using mecanum wheels, it can move inside pipes, record a video using a camera located on an arm inside the robot's head, and display this video on a monitor.
Fourth Year project Mechatronics Engineering. By: Abdulrazak Alsalama
Supervised by: Jamil LAYOUS, and Ghadeer SHAABAN
 Watch Video
Watch VideoDesign and Execute In-Pipe Robot.
Date: Sept 2019.
Institution: Higher Institute for Applied Sciences and Technology.
Address: Damascus, Syria.
Robot capable of moving within tubes. The importance of this project comes from the fact that it deals with a fundamental problem that occur in most tube-based applications. This project provides a reliable solution to overcome such problems.
Final year project, Mechatronics Engineering. By: Drgham MOHAMMAD
Supervised by: Jamil LAYOUS, and Ghadeer SHAABAN
 Watch Video
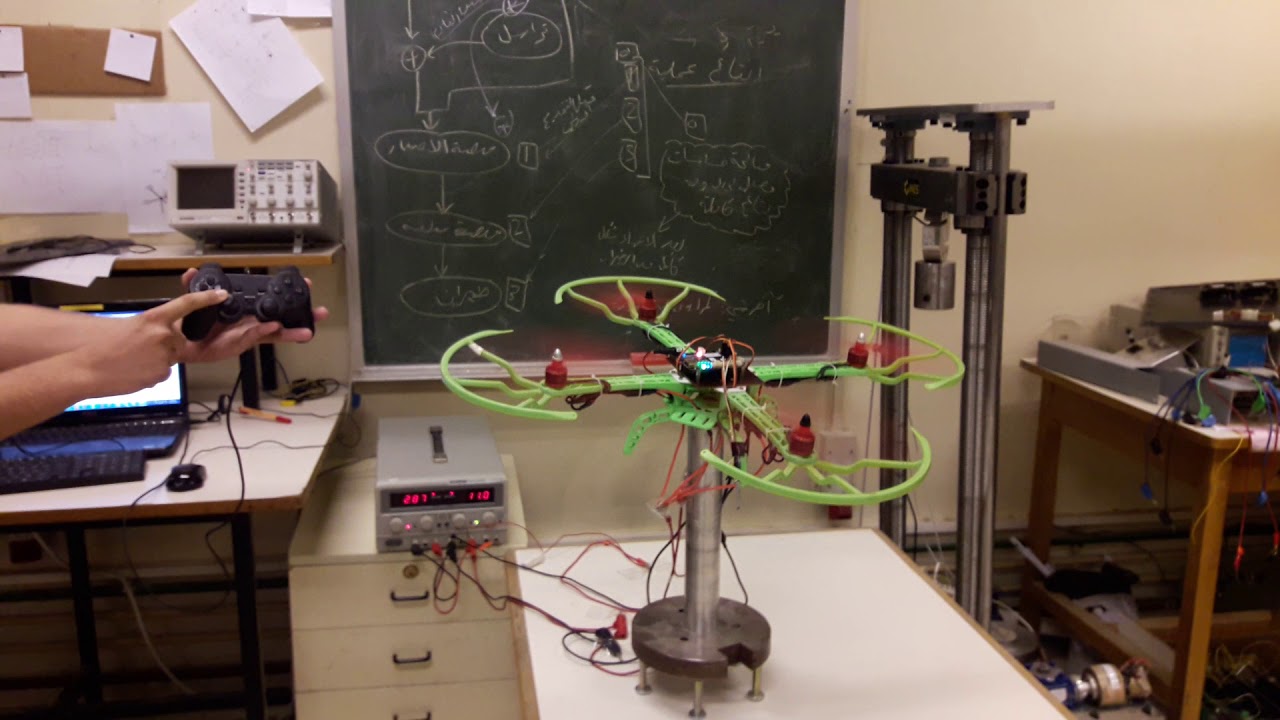
Watch VideoDesign, Execute and Control of a 3DOF Hover System.
Date: Sept 2018.
Institution: Higher Institute for Applied Sciences and Technology.
Address: Damascus, Syria.
This project is my graduation project. The project aims to design and execute 3 DOF Hover as it also aims to control the stability of the system. Work has been accomplished by using the BeagleBone Blue development kit, also a communication module has been executed, this module consists of a computer with Joystick, via this Joysticks the control orders can be made and they are sent to the controller via bluetooth.
 Watch Video
Watch Video